WorldBench
Advancing research in 3D and 4D world modeling, embodied AI, and autonomous driving through benchmarks, evaluation frameworks, and open-source tools.
Advancing research in 3D and 4D world modeling, embodied AI, and autonomous driving through benchmarks, evaluation frameworks, and open-source tools.
An open research initiative building the evaluation infrastructure for generative world models — from 3D scene understanding to closed-loop autonomous driving.
Full-spectrum evaluation frameworks that go beyond perceptual metrics to assess geometry, physics, and behavioral realism.
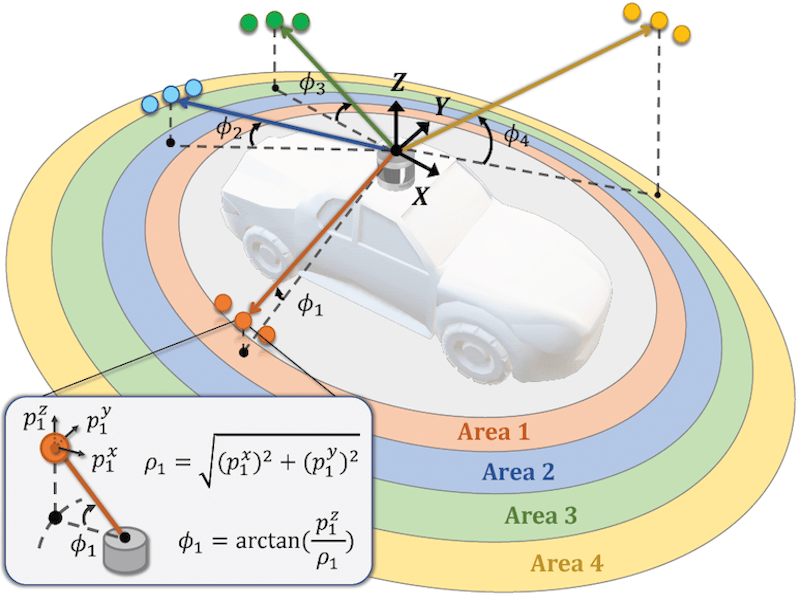
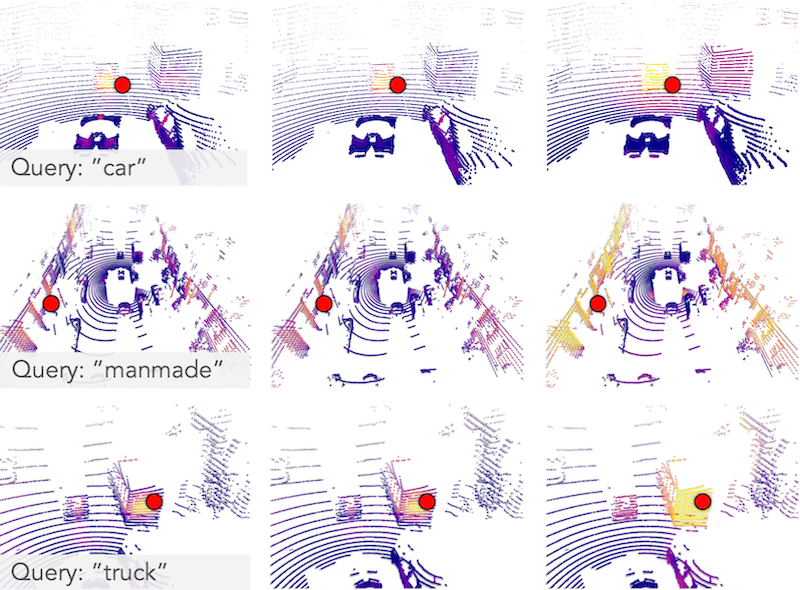
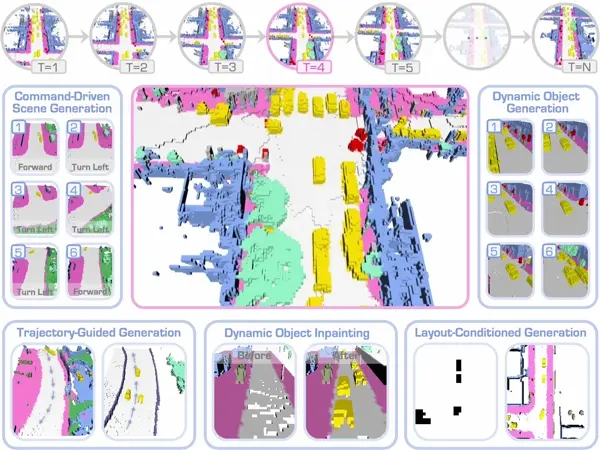
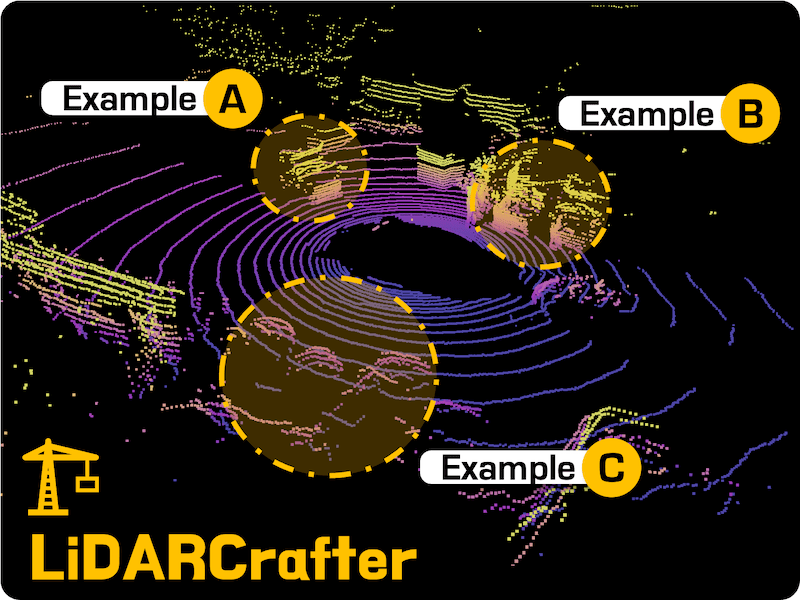
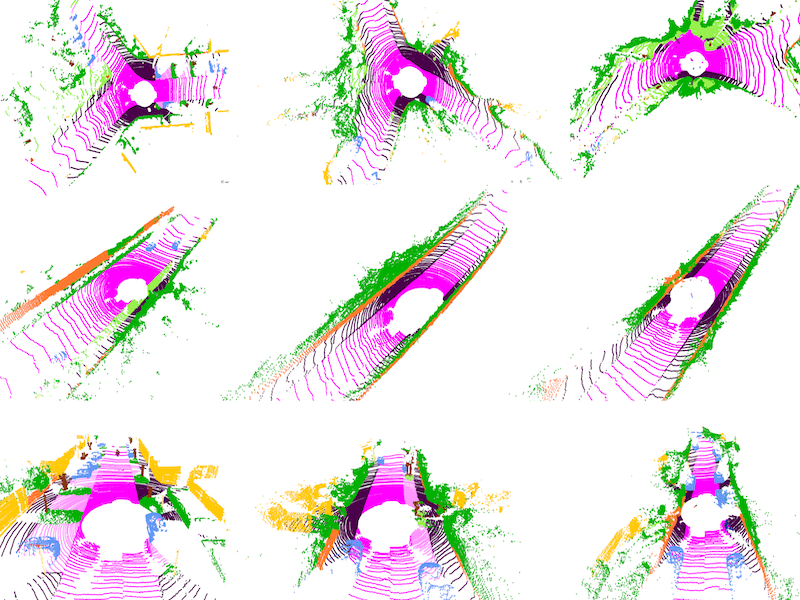
Research on 3D/4D generative models, LiDAR synthesis, occupancy prediction, and future scene forecasting.
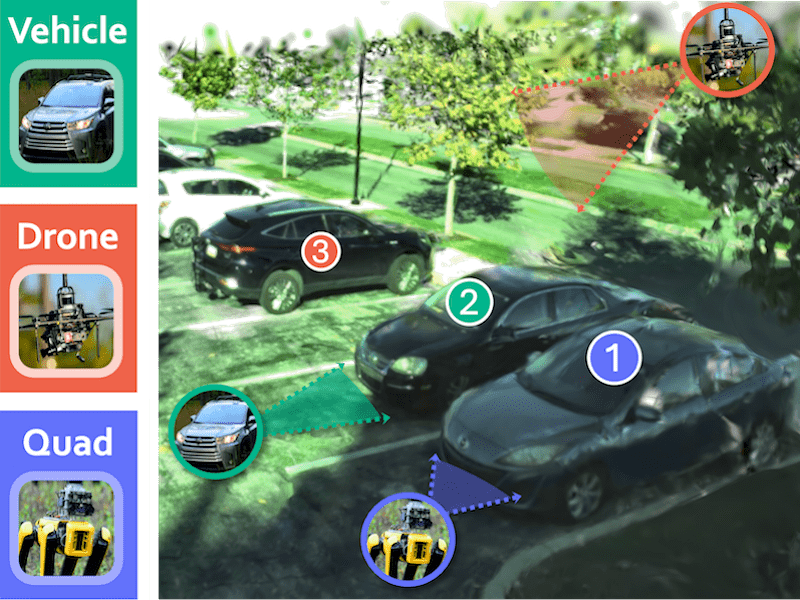
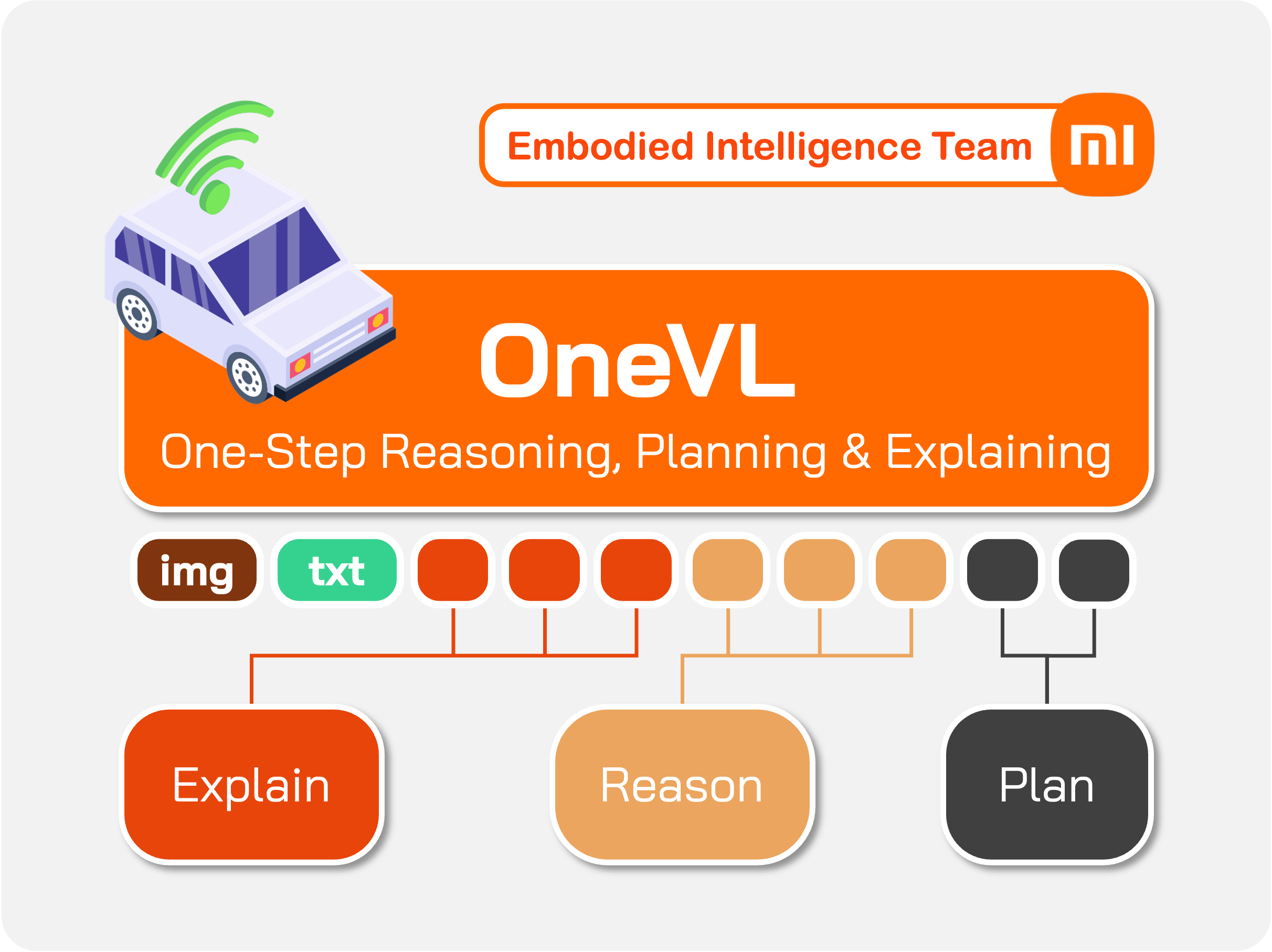
Vision-language-action architectures, trajectory planning, and safety evaluation for real-world deployment.
A growing collection of benchmarks, surveys, models, and toolkits advancing world modeling research.
A growing community of researchers across institutions and industry labs worldwide.